X-Bot est une famille de robots mobiles directement dérivés de Geeros: structure similaire, mêmes moteurs, mêmes roues, même batterie,... La partie intelligente du robot peut être facilement interchangée. X-Bot est une plateforme robot mobile entièrement ouverte et modifiable.
Les caractéristiques techniques de X-Bot "Raspberry Python" sont les suivantes:
Matériel:
- carte micro-contrôleur A-Star 32U4, compatible Arduino
- Atmega32u4, 32 Ko de mémoire flash, 16 MHz, programmation par interface USB ou par connecteur ICSP
- 2 ponts en H intégrés pour commander deux moteurs à courant continu jusqu'à 1.8A
- 12 entrées analogiques 10-bits
- 20 entrées-sorties digitales
- 7 voies PWM
- 2 interfaces série TTL
- connecteur 40 broches pour branchement sur une carte Raspberry Pi (A+, B+ ou Pi 2 modèle B)
- 3 boutons poussoirs
- 3 LEDs
- 3 convertisseurs bi-directionnels 3.3V / 5V
- accès aisé aux entrées/sorties grâce à un groupe de broches signal / masse / alimentation pour chaque voie.
- câble USB pour la programmation de la carte A-Star 32U4
- 2 moteurs à courant continu 6V avec réducteur 34:1 et codeur incrémental 48 CPR (1632 impulsions par tour d'arbre du réducteur). Vitesse nominale à 6V: 185 tr/min
- 2 roues
- 1 boule omnidirectionnelle
- 3 capteurs de suivi de ligne
- batterie LiPo 7.4V, 2200 mAh avec protection intégrée, permettant d'utiliser une alimentation normale pour la charge
- alimentation 12V, 1A pour charger la batterie
- plateau inférieur (supportant les moteurs) en plexiglas bleu, facile à percer pour ajouter vos propres composants
- plateau supérieur de prototypage mécanique en plexiglas bleu: déjà usiné pour vous permettre d'ajouter très facilement vos propres composants sans perçage nécessaire
Cette version intègre de plus une carte Raspberry Pi (interfacée en i2c via le connecteur 40 broches de l'A-Star 32U4) pour la communication Wifi avec un Linux embarqué (distribution Raspbian). Elle permet le pilotage à distance du robot et la récupération de données (télémétrie) depuis un ordinateur ou un smartphone, via une application Web.
Cette carte Raspberry Pi exécute entre autres les éléments suivants:
- serveur Web (les fichiers de l'application Web de pilotage à distance sont fournis en code source)
- serveur FTP
- serveur SSH
- serveur mjpg-streamer pour la transmission vidéo en temps-réel (compatible avec n'importe quelle Webcam UVC)
- serveur de télémétrie de données
Notez que contrairement aux architectures Arduino + shield Wifi, vous n'avez pas besoin ici de programmer un serveur Web sur la carte A-Star et de coder en C les fichiers du serveur Web.
X-Bot "Raspberry Python" s'utilise beaucoup plus simplement:
- vous concevez votre application Web (ou vous modifiez celle fournie avec X-Bot) avec votre outil de développement classique (éditeur HTML ou environnement de développement Web évolué) sur votre machine de développement (Windows, Linux ou Mac)
- vous vous connectez à X-Bot "Raspberry Python" en FTP pour télécharger vos fichiers
- vous ouvrez votre navigateur Web préféré (depuis votre ordinateur ou votre smartphone) à l'adresse de X-Bot "Raspberry Python" (par défaut 192.168.0.199) pour accéder à votre application Web
X-Bot Raspberry Python est fourni avec les mêmes programmes et logiciels que Geeros et il est vendu monté.
A la différence de Geeros, X-Bot Raspberry Python n'est pas un gyropode: il possède un troisième point d'appui à l'arrière sous la forme d'une boule omni-directionnelle. Il possède par ailleurs 3 capteurs de suivi de ligne à l'avant .
X-Bot Raspberry Python permet par exemple de se concentrer sur la commande des moteurs électriques sans avoir besoin de gérer l'asservissement de verticalité d'un gyropode. Par exemple, il est possible de faire un programme qui va commander directement les moteurs en tension, sans asservissement de vitesse. Dans ce cas de figure, la disparité naturelle entre les caractéristiques des deux moteurs électriques permet de montrer aux étudiants qu'une même tension d'alimentation ne conduit pas nécessairement à une vitesse identique sur les deux moteurs. Le robot n'ira donc pas tout droit.
Ceci montre l'intérêt d'un asservissement de vitesse pour être sûr de maîtriser précisément la vitesse de chaque moteur.
Que chosir ? Geeros ou X-Bot ?
Si vous désirez choisir entre les deux robots, voici les éléments à prendre en considération:
- Si vous désirez absolument faire des expériences de commande de moteurs électriques sur un robot en fonctionnement posé sur le sol, sans vous soucier de l'asservissement de verticalité d'un gyropode, choisissez X-Bot
- Si vous désirez faire des expériences de suivi de ligne, choisissez X-Bot
- Si vous souhaitez faire des expériences avec un robot spectaculaire et original, choisissez Geeros
- Si vous souhaitez étudier un capteur évolué, comme une centrale inertielle communiquant en i2c, choisissez Geeros
- Si vous souhaitez travailler sur la transmission vidéo en temps-réel, choisissez Geeros (ceci étant, vous pouvez très bien ajouter une Webcam sur un X-Bot)
X-Bot Raspberry Python comparé à d'autres robots mobiles
Les avantages de X-Bot Raspberry Python par rapport à d'autres robots mobiles sont les suivants:
- Asservissements des moteurs programmés en Python. Seule la mesure de vitesse des moteurs est programmée en C
- Pilotable à distance en Wifi
- Serveur Web embarqué pour le pilotage et la transmission de données
- Les moteurs ne sont pas simplement commandés en boucle ouverte, ils sont asservis en vitesse
- Nombreux programmes et logiciels fournis pour réaliser différentes expériences, en particulier l'asservissement des moteurs électriques
- Plateau supérieur de prototypage mécanique permettant de fixer facilement de nouveaux capteurs et actionneurs
 X-Bot Raspberry Python
X-Bot Raspberry Python
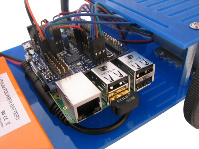
La carte Raspberry Pi "chapeautée" par l'A-Star 32U4

Application de pilotage depuis un ordinateur