Cet ensemble existe en 2 versions:
- à base d'Arduino Due, programmable en C
- à base de pcDuino Nano et d'une carte compatible Arduino, programmable en C (Arduino) et en Python
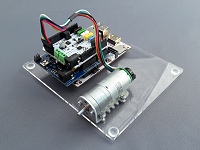
La version Arduino Due comprend, en plus de cette carte:
- un shield de commande moteur possédant les caractéristiques suivantes:
- basé sur un driver de moteur performant (DRV8871 de Texas Instruments)
- intègre un capteur de courant
- permet la mesure de la tension d'alimentation du moteur
- dispose de 6 connecteurs banane 2mm pour visualiser les signaux rapides (bornes moteur + et -, voies A et B du codeur incrémental et PWM) sur un oscilloscope
- un moteur électrique à courant continu avec réducteur 34:1 (http://boutique.3sigma.fr/moteurs/12-moteur-a-courant-continu-reducteur-34-1-codeur-incremental-48-cpr.html) et codeur incrémental intégré pour la mesure de vitesse
- une alimentation 7.5V, 2.6A
- un câble USB pour la programmation du micro-contrôleur et la mesure de données sur le système
Le tout est monté sur un boitier en plexiglas transparent.
Dans la version pcDuino, la carte Arduino Due est remplacée par l'association d'une carte pcDuino Nano et d'une carte Iteaduino Uno, compatible Arduino Uno. Par ailleurs, la moteur utilisé a un réducteur de 9.7:1.
Ce ensemble permet de réaliser différents types d'expériences de commande de moteur:
- Commande en tension: vous pilotez la tension de commande grâce à des curseurs pour créer un tension de commande constante, carré ou sinusoïdale à offset, amplitude et fréquence variable
- Asservissement de vitesse: vous pilotez la consigne de vitesse grâce à des curseurs pour créer une consigne constante, carré ou sinusoïdale à offset, amplitude et fréquence variable.
Vous pouvez également modifier le réglage du régulateur pendant le fonctionnement du système !
- Asservissement de position: vous pilotez la consigne de position grâce à des curseurs pour créer une consigne constante, carré ou sinusoïdale à offset, amplitude et fréquence variable.
Vous pouvez également modifier le réglage du régulateur pendant le fonctionnement du système !
De plus, la version avec Arduino Due permet de réaliser éventuellement tous ces asservissements en intégrant en plus une boucle de courant.
Dans tous les cas, les données mesurées s'affichent en temps-réel sur votre ordinateur.
Les programmes Arduino ou pcDuino (Python utilisant la librairie Pyduino) sont fournis en code source.
Asservissement de vitesse en utilisant le logiciel MyViz:
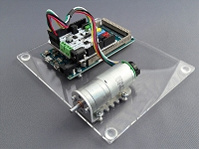
Version Arduino Due
Version pcDuino

Interface de commande en tension
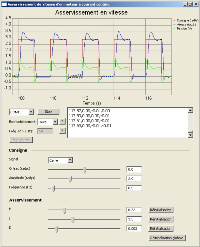
Interface d'asservissement de vitesse
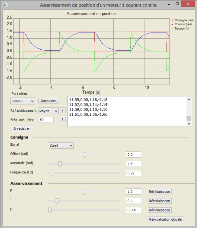 Interface d'asservissement de position
Interface d'asservissement de position