Un robot pédagogique n'est pas très utile s'il est fourni sans logiciel de pilotage ou de mesure.
Geeros est livré avec de nombreux programmes et applications permettant de réaliser diverses expériences.
Programmes Arduino
- Asservissement de verticalité, de vitesse longitudinale et de vitesse de rotation pour pilotage à distance (en Wifi) via un ordinateur, un smartphone ou une tablette. Ce programme est déjà chargé dans les robots livrés aux clients pour que Geeros soit utilisable dès sa sortie du carton !
- Commande en tension des moteurs électriques, sans asservissement de verticalité.
- Asservissement en vitesse des moteurs électriques, sans asservissement de verticalité.
Programmes Python
- Asservissement de verticalité, de vitesse longitudinale et de vitesse de rotation pour pilotage à distance (en Wifi) via un ordinateur, un smartphone ou une tablette. Ce programme est déjà chargé dans les robots livrés aux clients pour que Geeros soit utilisable dès sa sortie du carton !
- Commande en tension des moteurs électriques, sans asservissement de verticalité.
- Asservissement en vitesse des moteurs électriques, sans asservissement de verticalité.

Interface de pilotage par ordinateur
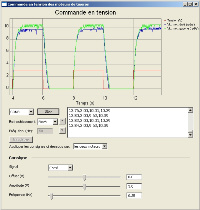
Interface de commande en tension des moteurs électriques
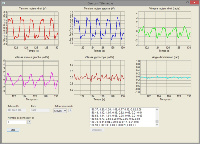
Télémétrie de données à distance via la liaison Wifi

Interface d'asservissement de vitesse des moteurs électriques
Logiciels d'interface
- Interface Web de pilotage interactif depuis un ordinateur, un smartphone ou une tablette: permet de modifier interactivement les consignes de mouvement. Cette application transforme le smartphone ou la tablette en télécommande Wifi: il suffit de basculer l'appareil en avant, en arrière, à gauche ou à droite pour piloter Geeros !
L'application affichage en temps-réel la vidéo prise par la Webcam embarquée. - Application de télémétrie: vous pouvez visualiser en temps-réel des données mesurées sur le robot et transmises à distance par Wifi. Les mesures peuvent également être enregistrées pour une analyse ultérieure.
- Interface de commande en tension des moteurs électriques: après avoir chargé le programme Arduino correspondant dans le robot, vous pouvez modifier interactivement la tension d'alimentation des moteurs, visualiser en temps-réel et enregistrer la vitesse de ces derniers.
- Interface d'asservissement en vitesse des moteurs électriques: après avoir chargé le programme Arduino correspondant dans le robot, vous pouvez modifier interactivement la consigne de vitesse des moteurs, visualiser en temps-réel et enregistrer la vitesse de ces derniers. Vous pouvez même changer le réglage de l'asservissement pendant le fonctionnement et voir immédiatement les effets sur les courbes !
- MyViz: ce logiciel (que vous pouvez télécharger ici) permet de créer facilement des tabeaux de bord de pilotage entièrement personnalisés, sans aucune programmation, en assemblant simplement des composants graphiques de contrôle et de visualisation.
Interface d'asservissement de vitesse des moteurs électriques
API Python ![]()
Geeros est également un robot programmable en Python
Une bibliothèque de fonctions vous permet de lui donner des consignes de mouvement depuis un programme Python ou même de façon interactive depuis la fenêtre de l'interpréteur (dans le cas du Python).
Les programmes Python peuvent être exécutés directement sur le robot sans interaction avec l'ordinateur hôte.
Ceci vous permet d'apprendre ces langages à vos élèves tout en l'utilisant sur une application très concrète.
# Démarre puis avance pendant 5 s à la vitesse
# de 50 cm/s
demarrer()
avancer(50, 5)
# Décrit un 8 trois fois de suite
for i in range(1,3):
avancer_et_tourner(50, 180, 1.6)
avancer(50, 0.4)
avancer_et_tourner(50, -180, 1.6)
avancer(50, 0.4)